
最近在筆電中裝了雙系統,除了原先Windows環境之外還另外安裝了Ubuntu的環境。因為之後想要做一些跟ROS有關的DIY系列,因此覺得或許建立一個Ubuntu的環境會更方便做開發。
目前安裝的環境是Ubuntu18.04,安裝方式可以參考[1]。在ROS官方網站[2]中,有介紹各個版本的ROS適合對應到的Ubuntu版本。因為我是使用Ubuntu18.04,因此安裝的ROS的版本會是Melodic比較好[3]。
這裡需要注意幾件事情,
- 各個ROS版本都有持續維護的期限,可以配合自己的需求做更改安裝ROS不同的版本,又或是更新整個Ubuntu的環境來進行ROS的升級。
- ROS目前有分為ROS1與ROS2 兩種,目前此處我是安裝ROS1。ROS1 最後一個版本是Noetic Ninjemys [4],而最新版ROS2 Foxy Fitzroy 的相關資料可以在官方的資料中獲得[5] 。
安裝步驟
確認好版本及環境之後,就可以跟隨著官方的教學一步步的安裝好環境。
步驟一、 選擇下載的版本
在Melodic版本的介紹網頁[2]中有一項「Installation」的項目,其中有一個連結就是引導我們安裝的順序的連結,點下去後即可以到選擇環境的頁面。
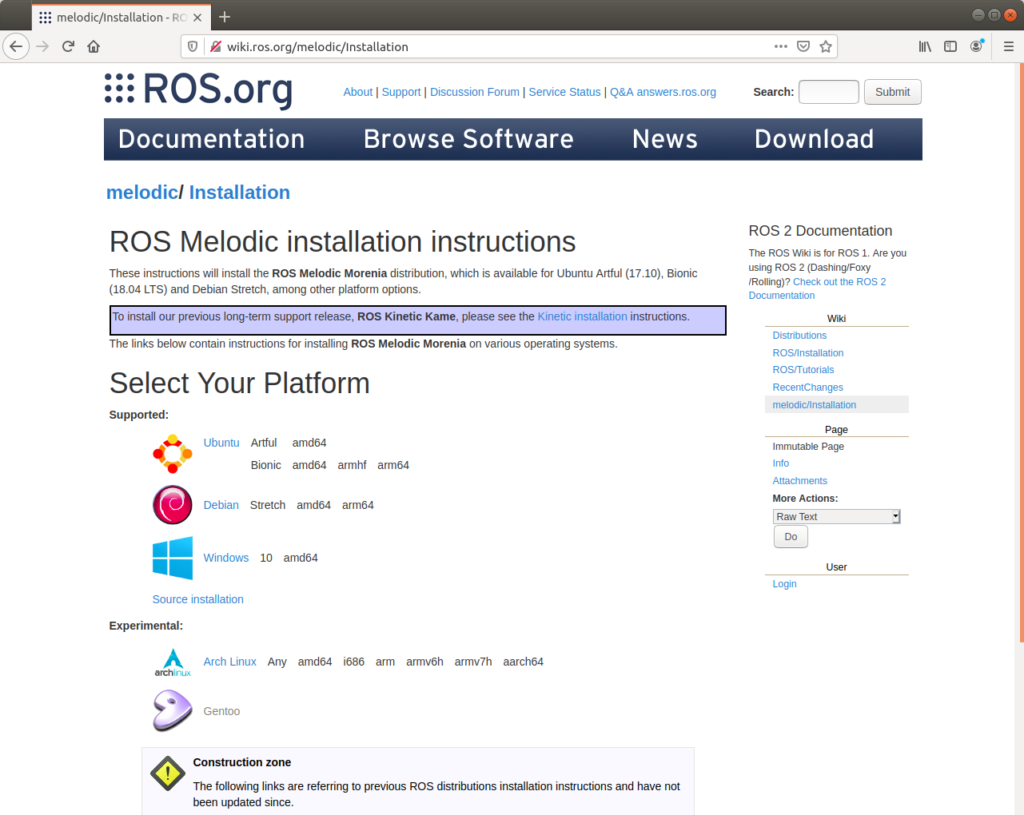
此處我是點選Ubuntu的環境進行安裝,點選環境後,就會出現一系列的安裝步驟介紹[6]。(接下來的安裝步驟皆是參考自[6])。
步驟二、設定資源來源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'在ubuntu的環境中,首先開啟終端機(快捷鍵為 Ctrl + Alt + T),接著將上方資料貼入(終端機裡的貼上為Ctrl + Shift + v)後按下Enter即可。
步驟三、設定金鑰
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654在終端機輸入完成後,系統就會自動更新建立一個對於Open Robotics <info@osrfoundation.org> 即ROS安裝資料環境來源的金鑰資料。
步驟四、安奘主要程式
安裝前,會先需要更新Debian軟件包到最新的狀態。
sudo apt update接著針對自己的需求安裝需要的ROS環境。在安裝的頁面中有提供四種項目:
這裡我是選擇安裝第一項 Desktop-Full。
sudo apt install ros-melodic-desktop-full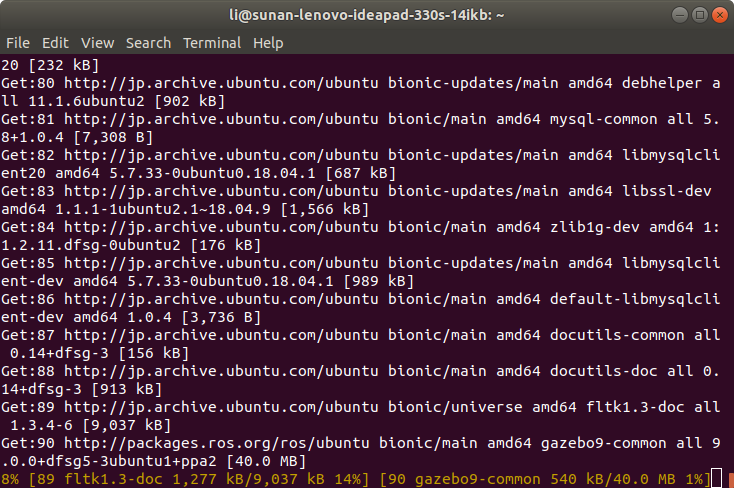
步驟五、環境資料設定
安裝好ROS後,為了在之後每次開機時都可以自動先啟動相關的功能,因此需要在管理電腦系統環境的資料中加入下面的這句指令。
source /opt/ros/melodic/setup.bash加入的方式可以使用
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc加入後記得要更新一次
source ~/.bashrc步驟六、安裝相關會用到的資料包
最後安裝之後會用到的相關資料。
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential安裝好後使用以下指令來初始化:
sudo rosdep init
rosdep update步驟七、啟動確認
最後在安裝完成後,可以透過輸入roscore 來確認是否有安裝成功。
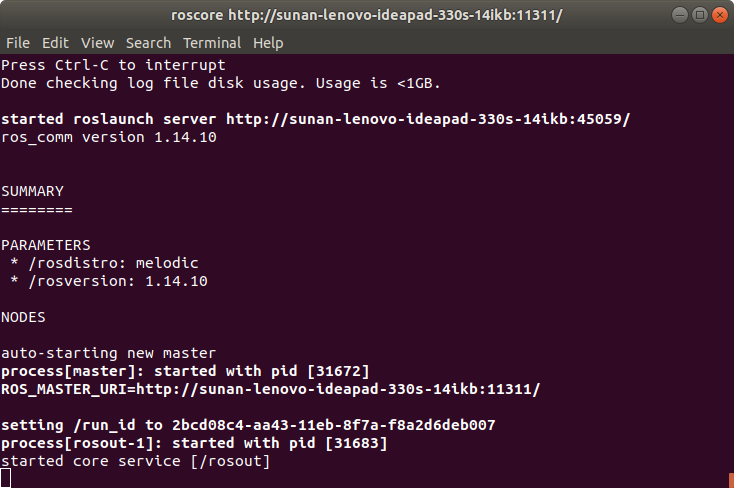
屆此安裝的步驟就告一段落,接著就可以開始進行使用的學習,或是直接開始使用。
參考資料
[1] Ubuntu 雙系統安裝方式
[2] ROS
[3] ROS Melodic
[4] Noetic Ninjemys: The Last Official ROS 1 Release
[5] ROS2 Documentation: Foxy
[6] Ubuntu install of ROS Melodic
コメント